The Exocet project would be the largest and most prominent of rocket-based systems projects in the Bifrost program, supporting the largest vehicles and most likely the first reusable manned vehicles in the program. It would also be uniquely suited to the situation of Aquarius’ new marine-based branch of civilization, being initially based on in-water launched vehicles. In-water launch is a proven technology with a long history, having been employed in the earliest stages of the space programs of the Cold War superpowers. Vehicles are designed to be watertight or water-resistant with a certain degree of buoyancy and are simply deployed from a ship and held in vertical position for launch by a weight attached to a communications umbilical. Smaller rockets are ballasted for neutral buoyancy just under the water surface in order that they are sheltered from jostling by surface waves. Larger rockets can be allowed to emerge from the water for pre-launch service by boom or float platform.
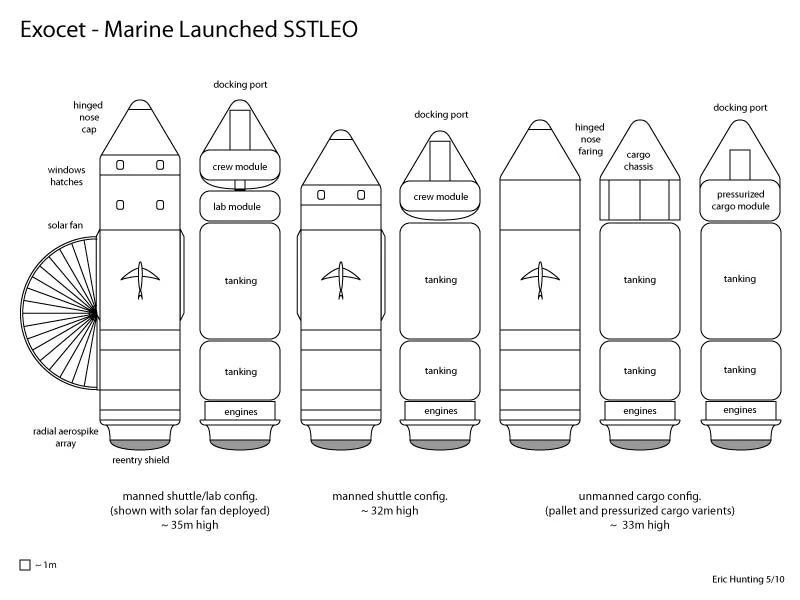
Marine Launched SSTLEO[]
{kind=link}
The advantages of marine launch are many. Rockets need little adaptation to be deployed in this manner while one has unlimited freedom in choosing launch locations, though calmer waters favor Equatorial locations. This is particularly helpful for early development projects, where limited funds and rampant nepotism among the existing space agencies and aerospace industry make finding launch venues of some scale difficult and unnecessarily expensive for entrepreneurs and small groups. Ship deployment leaves limited space for command and payload support facilities while linking communications from random ocean locations to mainland facilities can be difficult or impossible. However, for marine settlements these problems are completely eliminated. Long-term, marine launch allows for an unlimited increase in scale of vehicles. Massive spacecraft that would be impossible to launch anywhere on land due to the impractical scale of launch gantry structures and the vast area subject to damaging noise and vibration could be readily deployed at sea, though most of the Exocet program will tend to focus on modest scale SSTO or DSTO systems.
The Exocet project is likely to see its start at least as early in the Bifrost program as the UltraLight project, being a likely focus of semi-hobbyist/semi-commercial attention by the early residents of Aquarius Seed settlements. From this start its growth is likely to parallel the growth of these settlements, expanding with communities’ ability to host progressively larger and more sophisticated support facilities and larger and more sophisticated carrier vessels –ultimately employing the EcoCruiser vessel platform.
Starting with fairly small and simple unmanned non-reusable systems, the Exocet project would eventually divide into four development branches; unmanned/non-reusable, unmanned/reusable, manned/non-reusable, and manned/reusable. The first two branches could have single-stage and dual-stage variants intended to support both LEO and GEO missions. The latter two would be limited to LEO, relying on rendezvous with a reusable orbital transfer vehicle to provide GEO access. All these classes of vehicle would tend to have common characteristics and a similar form. Let’s examine each of these branches in turn, in order of their likely progression in development.
Unmanned/non-reusable[]
Starting with very early experimental rockets, this branch of the Exocet project would culminate in the form of a simple vehicle looking very much like the classic Polaris submarine launched ballistic missile in single and dual stage forms. SSTO/DSTO capability would be based on the simple strategy of minimizing vehicle mass through composite structure, nested fuel and oxidizer tanking, compromising on payload fraction, and –if not initially, eventually– employing a radial aerospike main-stage engine array to eliminate the mass of mechanical thrust vectoring systems and to allow for unlimited scalability. With earlier rocket technology, multi-stage systems were quite logical despite their added complexity and lower potential reliability because overall system performance was such a near thing. Today, engine performance is much advanced and structural materials greatly reduced in mass. For a system that is employing some kind of mass production it now makes much more logistical sense to simplify systems even where it comes a nominal cost in payload fraction –especially when you have a system design that is freely scalable and would tend to lower cost-per-kilogram with either increasing size or increasing production volume. A modular approach to design would be used with payload carrier, tanking, and engine modules designed for independent fabrication and potential mass-production. Recoverable payloads would rely on self-contained capsule designs intended for ballistic reentry and parachute recovery. This class of the Exocet would be intended to scale freely, potentially producing vehicles of quite large size. But like the UltraLight its use would tend to favor lower cost commodity supply payloads.
Manned/non-reusable[]
This would essentially be the same vehicle as the unmanned form but engineered with the necessary tolerances and system redundancy to be ‘man-rated’. It would be optimized for carrying a self-contained crew vehicle with a cylindrical pressure capsule, top-mounted docking tunnel and flight systems space-frame chassis (covered by a discarded nose cone faring), and a bottom-mounted ablative reentry shield with possibly an additional pneumatic shield faring.
Unmanned/reusable[]
Here the architecture of the Exocet would see a key evolutionary change in that the vehicle would now become a much more unified structure that combines engines, tanking, control, and recovery systems in a primary module and payload in a top-mounted secondary module with discarded nosecone that, itself, is not intended for recovery unless carrying a reusable automated cargo transfer module. This form would still be similar to all the Exocet designs in basic appearance but the primary module would be designed for whole recovery, the radial aerospike engine section now adapted to serve as part of a ballistic reentry shield where a deployable pneumatic reentry shield faring stowed in an insulated compartment in the center of the engine faring would pop-out after the de-orbit burn to shield the upper engine array exhaust ports from plasma infiltration. Later, this may be replaced by the use of a gas-plasma shield system where the engine array ejects a stream of gas during reentry to create its own pressure-fed plasma shield. Recovery would then be by conventional parachute and splash-down. Though not likely to ever be GEO-capable on its own, this vehicle should still offer high scalability, potentially rivaling the non-reusable systems in payload capacity.
Manned/reusable[]
This would be the single-most sophisticated form of the Exocet but one limited almost entirely to passenger transport, starting with a two passenger system and perhaps topping at a six or eight man vehicle, the whole vehicle system scaled proportionally. It would evolve into two variants; one using the same type of reentry mode as the unmanned/reusable form and the other employing a very unique form of active landing. Largely similar to the unmanned/reusable vehicle, this vehicle would feature a cylindrical crew capsule on top akin to that of the manned/non-reusable variant that’s equipped with an extended upper orbital flight system chassis section featuring small cargo compartments and deployable solar and radiator panels under fold-out faring sections and a top-most airlock and docking module which may also feature its own internal radial cargo compartments.
The first generation of this vehicle would employ the same engine technology as the unmanned/reusable variant, now engineered to be man-rated. It would employ simple parachute assisted splash-down recovery. But the second generation of the vehicle would employ a much more sophisticated SABRE air-breathing variant radial aerospike that would allow for controlled VTOL landing. It would not carry it’s own landing gear, however, and would instead employ the use of a self-aligning landing cradle on a VTOL pad built on a conventional PSP marine platform. This VTOL pad would also be used for launch, allowing for more convenient passenger transfer than the in-water launch. So much precision is required for vertical landing of a spacecraft in the first place that the added control needed to align the vehicle with a small landing pad is not that significantly greater a challenge, an active landing cradle being capable of enough last-minute alignment of its own to compensate for any last-second error. If the vehicle cannot get to the landing pad, it would still be able to safely splash-down, incurring only an extra inconvenience for passengers and extra recovery and refurbishing time.
The manned/reusable Exocet would likely become the iconographic spacecraft of the middle-phase of the Bifrost program, since even with the Bifrost Space Elevator eventually assuming most payload transport, it would not be able to support passenger traffic until it evolved to a very large scale. Thus the first generations of manned orbital habitats will likely rely on this vehicle for a long time.
Related Material[]
Sub-Topics[]
Peer Topics[]
- SkyScraper
- Mountain Waverider
- UltraLight SSTO
- MODroc
- LightCraft
- Marine Mass Launcher - MML
- Bifrost Space Elevator
- Bifrost Support Systems
Parent Topic[]
Phases[]
| ||||||||||||||